前言
传统伞齿差速器虽已广泛应用,但对差速器结构更轻更小的不断探索并没有停止。
舍弗勒研发的直齿行星差速器,首次在Audi e-tron车型上实现量产应用,凭借独特的结构设计,实现了更小更轻的突破。
本文从结构原理、与伞齿差速器的对比、差速与扭矩等分的原理推导三个核心维度,带大家全面认识这款差速器。

图:传统伞齿差速器
直齿行星差速器的结构与核心原理
直齿行星差速器的核心作用,与传统差速器一致,
- 协调左右驱动轮的转速差(比如转弯时内外轮行驶距离不同导致的转速差异)
- 同时保证扭矩均匀分配给左右半轴,确保车辆平稳行驶。
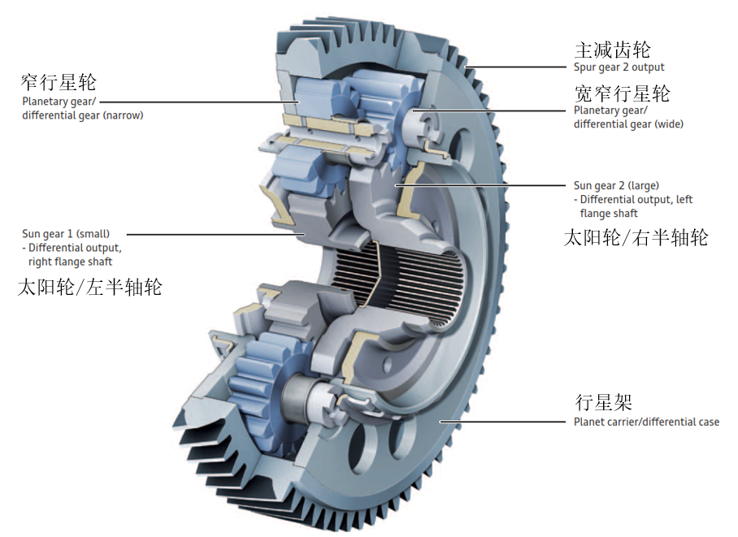
图:直齿行星差速器结构图
核心部件
结合舍弗勒直齿行星差速器的结构设计,其核心部件主要包括:
行星架、行星销、宽行星轮、窄行星轮、左/右半轴太阳轮。各部件分工明确,协同完成动力传递与差速协调:
- 行星架:动力输入部件,扭矩首先传递至行星架,带动整个行星轮系运动,是差速器的“动力中枢”;
- 行星销:固定在行星架上,用于支撑宽行星轮和窄行星轮,确保行星轮能够稳定自转和公转;
- 宽行星轮/窄行星轮:核心传动部件,二者啮合连接,分别与左右半轴太阳轮啮合,负责将行星架的动力传递至半轴,同时通过自转补偿左右半轴的转速差;
- 左/右半轴太阳轮:动力输出部件,分别连接左右驱动半轴,将扭矩传递至车轮。
动力传递路径
直齿行星差速器的动力传递逻辑清晰,全程通过直齿啮合完成动力传递,具体路径如下(结合舍弗勒量产方案):
扭矩从行星架传递进来 → 行星销 → 宽行星轮/窄行星轮 → 左/右半轴太阳轮 → 左右驱动半轴 → 车轮
其中,宽行星轮与窄行星轮的配合是实现差速的关键:
当车辆直线行驶时,左右半轴转速一致,宽、窄行星轮仅随行星架公转,不发生自转;
当车辆转弯或左右轮出现转速差时,宽、窄行星轮会相应自转,通过齿轮啮合的转速补偿,协调左右半轴太阳轮的转速差异,避免车轮滑动。其啮合过程可简化为:大太阳轮 → 宽行星轮 → 窄行星轮 → 小太阳轮,与伞齿差速器的行星齿轮作用一致,但啮合方式更简洁。
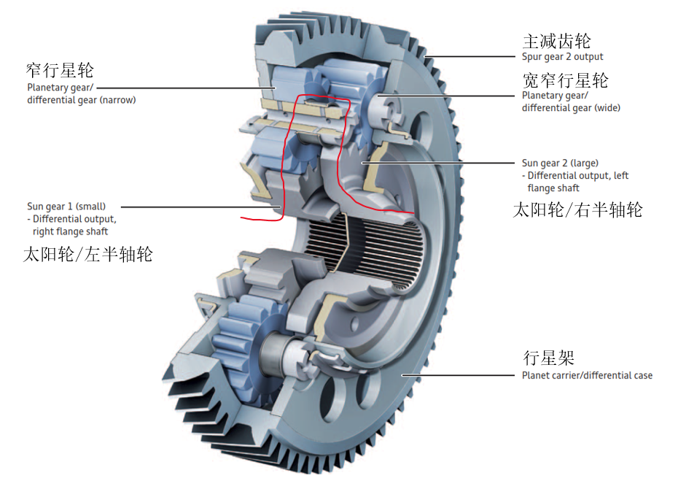
图:左右轮出现转速差时的动力流
设计要点
直齿行星差速器的设计有两个核心要点,直接决定其差速和扭矩分配性能:
- 左右半轴齿轮齿数必须相等:这是左右半轴转速相等的必要条件。舍弗勒在Audi e-tron的应用中,左右半轴齿轮齿数均设计为30,确保直线行驶时左右轮转速一致,避免车辆跑偏;
- 齿轮模数统一:行星轮(宽/窄)与左右半轴太阳轮必须采用相同模数,确保齿轮能够互相啮合,模数不一致会导致啮合间隙异常,引发噪音和部件损坏。
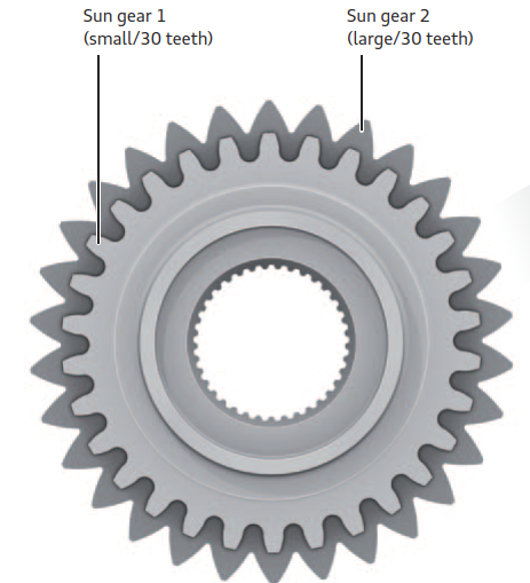
图:左右半轴齿轮的齿数必须相等
二、直齿行星差速器与伞齿差速器的结构对比
传统伞齿差速器(又称锥齿轮差速器)是燃油车时代的主流方案,
其核心由差速器壳体、伞形行星齿轮、伞形半轴齿轮组成,动力通过伞齿啮合传递。
而直齿行星差速器采用直齿啮合设计,二者在结构、性能上差异显著,具体对比如下:
- 齿轮类型:直齿行星差速器采用直齿圆柱齿轮(宽/窄行星轮、半轴太阳轮),啮合方式为平行轴直齿啮合;伞齿差速器采用锥齿轮(行星轮、半轴齿轮),啮合方式为交叉轴伞齿啮合;
- 空间布局:直齿行星差速器轴向空间紧凑,可巧妙利用主减齿轮的轮辐内腔体,集成度高,适配电驱系统的紧凑化需求;伞齿差速器因伞齿啮合角度限制,轴向空间占用较大,且需要额外的支撑结构;
- 支撑需求:直齿行星差速器的左右半轴齿轮仅传递扭矩,无轴向力,对支撑件的结构强度要求较低;伞齿差速器在啮合过程中会产生较大轴向力,需要高强度支撑件(如轴承,差壳等),增加了整体重量和成本。
- 重量:轻,相比传统铸造伞齿差速器可显著减重,单台重量不到10kg。
- 扭矩传递能力:和伞齿差速器能力相当。
结语
直齿行星差速器是汽车差速器技术从传统燃油车向新能源汽车适配的重要突破。与传统伞齿差速器相比,它以结构紧凑、轻量化、高扭矩传递、无轴向力的核心优势,完美契合新能源汽车电驱系统的紧凑化、高效化需求,同时通过科学的齿轮设计和杠杆原理,稳定实现差速与扭矩等分,保障车辆行驶的平顺性和操控性。
