前言
作为市面上量产的同轴方案之一,采埃孚ZF 的同轴减速器不同于舍弗勒的双联行星轮方案,而是比较巧妙的差减一体方案,也就是说没有专门的差速器结构,而是融入了行星轮系之中,这也是Indi名字的由来(integrated differential gearbox),这篇文章就来研究一下这款减速器。
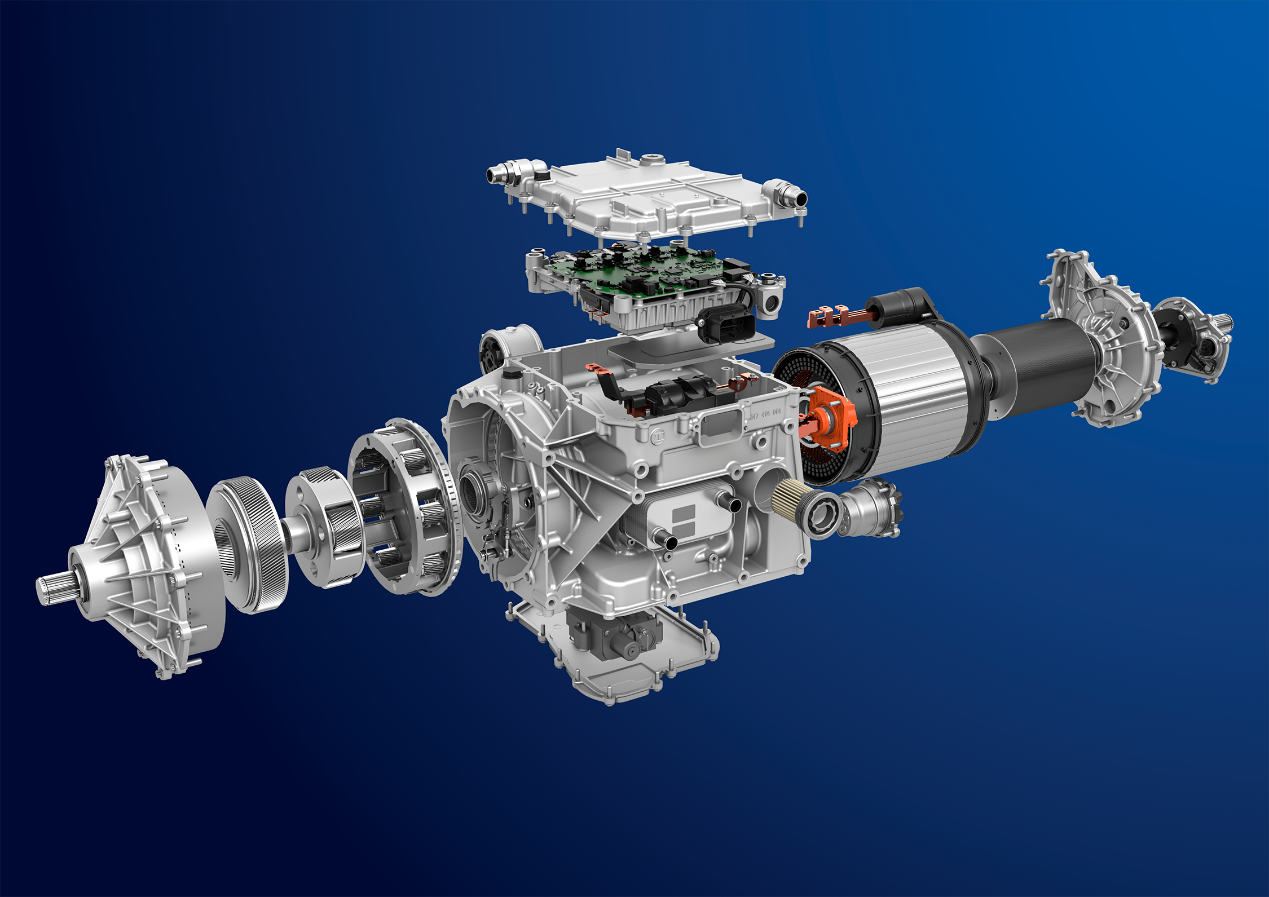
集成Indi减速器的ZF 三合一电驱动系统爆炸图
差速器的核心功能
差速器功能简单来说就是:差速,但不差扭。
差速: 一边转速的减少量等于另一边转速的增加量。
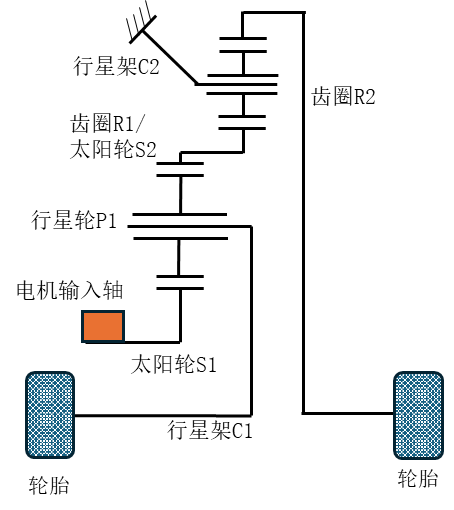
ZF Indi同轴减速器原理简图
动力流:
- 动力经 S1 → P1 → C1(左轴)。
- 同时 S1 → P1 → R1 → S2 → P2 → R2(右轴)
ZF INdi 差速的原理
转速的差速
上一篇中推导出的ZF INdi 减速器太阳轮转速,一级行星架转速,和二级齿圈转速之间的关系式如下:
$$n_{S1} = \frac{1}{1+\alpha_1+\alpha_2}n_{PC1} + \frac{\alpha_1+\alpha_2}{1+\alpha_1+\alpha_2}n_{R2}$$
可以看出,输入和两个输出之间是一个线性关系式。自然而然就满足差速功能的要求。这个公式描述了ZF INdi 减速器基本的的转速约束关系。
这个公式的物理意义
说明 行星架PC1 与 内齿圈R2 之间存在确定的 线性 运动学耦合关系, $n_{PC1}$ 与 $n_{R2}$ 之间互相线性制约,但又并没有被唯一确定。
这正是差速机构的数学特征:一个输入 → 两个输出之间存在一条线性约束 → 输出可相对变化。自然而然就说明这个结构是满足转速差速要求的。
如果要从数学上来说明的话,就继续往下看 👇
数学推导
如果从数学上来说的话,可以按照转速变化率来理解,
如果固定输入转速$n_{S1}$ = 常数,把总方程改写成差速形式
$$\Delta n_{PC1} + \frac{\alpha_1+\alpha_2}{1+\alpha_1} \Delta n_{R2} = 0$$
或写成“相对变化率”:
$$\frac{\Delta n_{R2}}{\Delta n_{PC1}} = -\frac{1+\alpha_1}{\alpha_1+\alpha_2}$$
物理意义:R2 转速增加,PC1 必然按比例降低,比例由齿数参数决定。由前述分析可知: ,所以,会得到:
$$\alpha_1 = \alpha_2$$
那就意味着一边转速的减少,等于另一边转速的增加量,这就实现了差速功能。
扭矩均分
除了差速,还要能够实现扭矩均分。分析扭矩可以从功率流角度来,
理想无损条件下的满足功率守恒
$$P_{in} = P_{out1} + P_{out2}$$
用转速 × 扭矩表示:
$$n_{S1} \cdot T_{S1} = n_{PC1} \cdot T_{PC1} + n_{R2} \cdot T_{R2}$$
代入速度关系可得:
$$\frac{1}{1+\alpha_1+\alpha_2}n_{PC1} \cdot T_{S1} + \frac{\alpha_1+\alpha_2}{1+\alpha_1+\alpha_2}n_{R2} \cdot T_{S1} = n_{PC1} \cdot T_{PC1} + n_{R2} \cdot T_{R2}$$
$$n_{PC1} \left( \frac{T_{S1}}{1+\alpha_1+\alpha_2} - T_{PC1} \right) + n_{R2} \left( \frac{(\alpha_1+\alpha_2)T_{S1}}{1+\alpha_1+\alpha_2} - T_{R2} \right) = 0$$
两个输出扭矩之比为:
$$\frac{T_{PC1}}{T_{R2}} = \frac{\alpha_1+\alpha_2}{1}$$
这就是该机构的固有扭矩分配比。因为 $alpha_1 = alpha_2$,所以 {PC1} = T_{R2}$,这就说明了扭矩是均分的。
以上,就从数学和物理上,分析了ZF Indi减速器的减速+差速原理
实际案例:ZF Indi 减速器
从网络上查到ZF 量产的这款减速器的齿数如下:
参数 |
太阳轮S1 |
行星轮P1 |
齿圈R1 |
太阳轮S2 |
行星轮P2 |
齿圈R2 |
齿数 |
36 |
49 |
136 |
151 |
20 |
193 |
分别计算:
$$\alpha_1 = \frac{z_{R1}}{z_{S1}} = \frac{136}{36} = 3.778$$
$$\alpha_2 = \frac{z_{R2}}{z_{S2}} = \frac{193}{151} = 1.278$$
发现两者并不完全相等,那么左右轮的扭矩之比为:
$$\frac{T_{PC1}}{T_{R2}} = \frac{\alpha_1+\alpha_2}{1} = \frac{3.778+1.278}{1} = 5.056$$
假设输入扭矩Ts1 =520Nm,那么
$$T_{PC1} = \frac{T_{S1}}{1+\frac{1}{5.056}} = 440.5 \text{Nm}$$
$$T_{R2} = \frac{T_{S1}}{\frac{1}{5.056}+1} = 87.1 \text{Nm}$$
左右轮的扭矩差值
$$\Delta T = T_{PC1} - T_{R2} = 440.5 - 87.1 = 353.4 \text{Nm}$$
速比:
$$i = \frac{n_{S1}}{n_{PC1}} = 1 + \alpha_1 = 1 + 3.778 = 4.778$$
这款减速器据说已经量产,反过来也说明,实际应用中,在配齿选择齿比的时候,可能并没办法完全保证 和 完全相等,而是确保差值在一定范围内,进而确保左右轮端分配的扭矩和转速差控制在可接受范围内。
结语
以上把ZF INdi减速器的减速原理,以及最重要的速比关系,还有差速的原理说明白了!感叹这款减速器的设计构思确实精妙,机械美学!
当然这些只是这款减速器设计的基本原理,想要设计出来一款实际量产的减速器,还要考虑一级和二级的配齿要求,一级和二级轴向力的平衡问题,因为一级齿圈和二级太阳轮是固连的,还有一级太阳轮的轴向力,以及安装空间的限制等等。
等后续有精力了,写一个这款减速器的配齿小程序。
