前言
作为市面上量产的同轴方案之一,采埃孚ZF 的同轴减速器不同于舍弗勒的双联行星轮方案,而是比较巧妙的差减一体方案,也就是说没有专门的差速器结构,而是融入了行星轮系之中,这也是Indi名字的由来(integrated differential gearbox),这篇文章就来研究一下这款减速器。
根据新闻稿,该款减速器已经于2025年在国内量产。以下是2025年12月的新闻。
“全球首台基于行星齿轮技术方案的Indi同轴减速器产品,近日在采埃孚杭州工厂正式下线并实现批量交付。这一创新产品将搭载于中国头部汽车制造商的主流中高端电动车型(搭载在吉利汽车),该车型首批车辆即将投放市场。此次批量交付不仅标志着采埃孚在电驱动核心部件领域的重要突破,同时也以“德国技术概念+中国自主研发”的创新模式,为采埃孚深化全球电动化战略、巩固亚太市场领先地位注入核心动能。”

新闻稿里提到的主要优点:
- 空间效率提升:相比传统减速器,体积缩减约50%,为电动车底盘布局释放更多设计自由度;
- 重量减轻:重量降低50%,助力整车续航能力提升;
- 传动效率优化:通过减少能量损耗,显著提升车辆动力性能与能效表现。
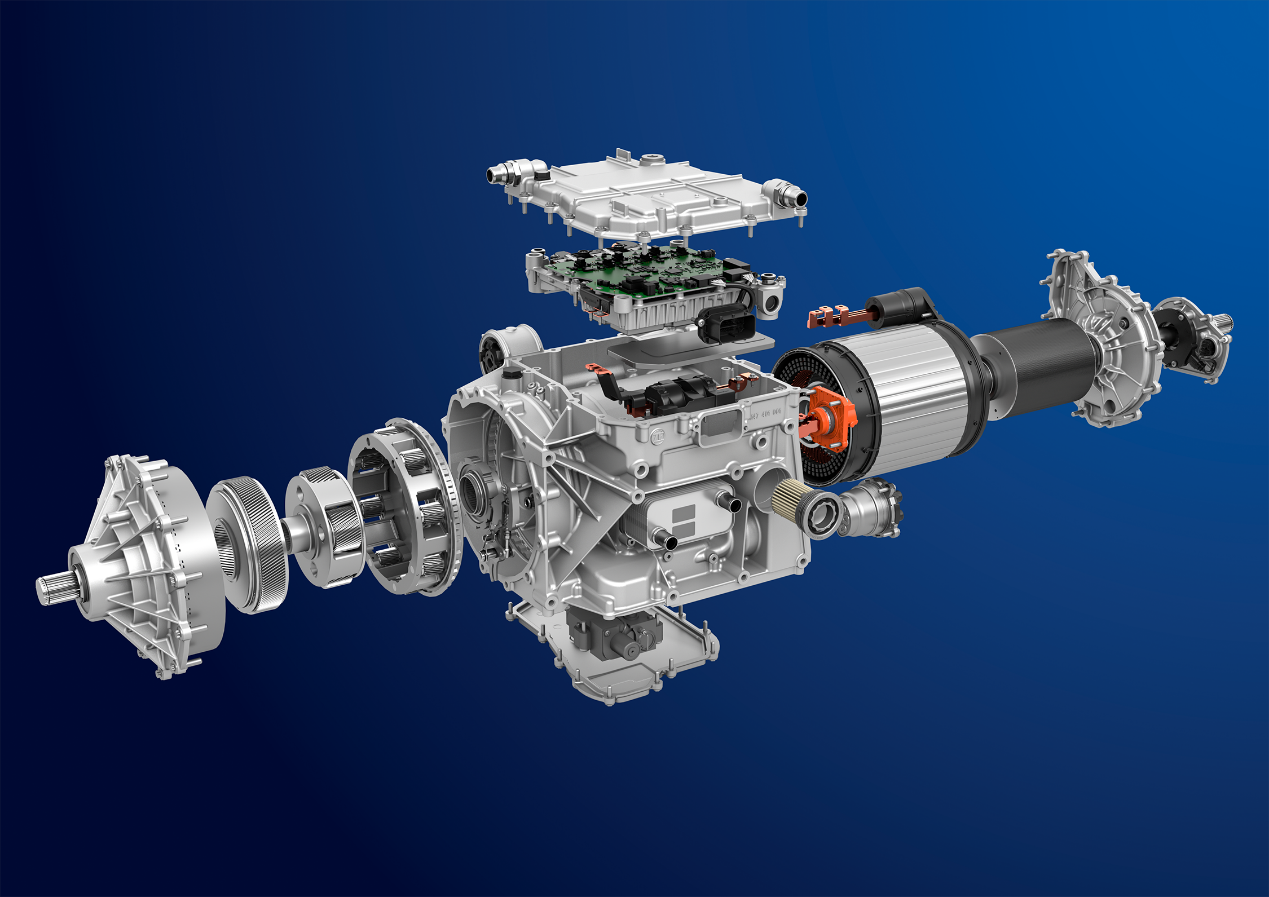
ZF Indi 减速器的结构
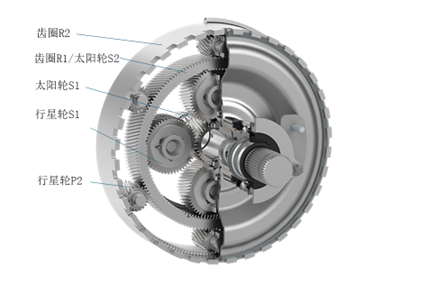
核心结构:双行星排同轴集成 (两级NGW行星排)
整体布局:
输入轴、两级行星齿轮组、左右输出轴完全同轴,取消传统平行轴 / 锥齿轮差速器,实现极致紧凑。
第一级行星排(减速 + 动力分配):
- 太阳轮 S1:与电机输入轴固连,输入动力。
- 行星轮 P1、行星架 C1:一级减速,将动力传递至第二级。行星架C1直接与左输出半轴连接。
- 齿圈 R1:与第二级太阳轮 S2 刚性连接(关键联动设计)。
第二级行星排(差速 + 输出)
- 太阳轮 S2:与第一级齿圈 R1 固连。
- 行星轮 P2、行星架 C2:固定于减速器壳体(静止)。
- 齿圈 R2:直接连接右输出轴。
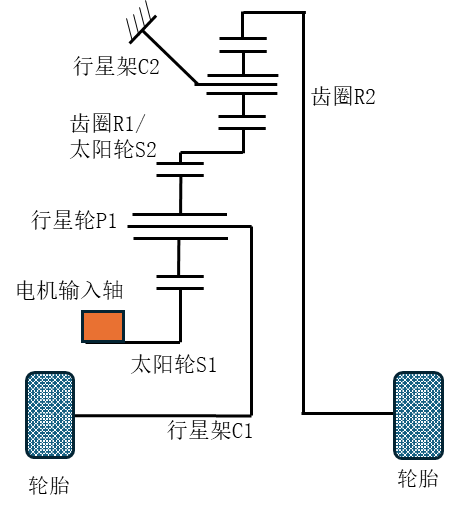
动力流:
- 动力经 S1 → P1 → C1(左轴)。
- 同时 S1 → P1 → R1 → S2 → P2 → R2(右轴)。
ZF Indi 减速器的工作原理
这款减速器要实现减速和差速二合一的功能,最!最!最!重要的关系是:
$$\frac{n_{S1}}{n_{R2}} = \frac{1 + \alpha_1 + \alpha_1\alpha_2}{1 + \alpha_2}$$
其中:α1是 一级齿圈齿数R1/ 一级太阳轮S1, α2是二级齿圈齿数R2/二级太阳轮S2.
这个公式是这款减速器设计的圭臬。
如果你想继续深入了解如何从数学推导上得到这个公式,就请继续往下看
速比计算
行星齿轮基本运动关系式
首先,抛出来一个简单行星齿轮机构,就以NGW型为例,其基本运动关系为:
$$n_S + \alpha n_R = (1+\alpha) n_{PC}$$
$$\alpha = \frac{z_R}{z_S}$$
这个公式描述了在行星齿轮机构中,太阳轮、内齿圈与行星架三者之间的转速约束关系。
这个公式的物理意义
该公式可改写为:
$$n_{PC} = \frac{n_S + \alpha n_R}{1+\alpha}$$
从中可以看出:
行星架转速是太阳轮转速与齿圈转速的齿数加权平均。
当 α 较大(齿圈齿数远大于太阳轮)时,行星架转速更接近齿圈转速
当 α 较小时,行星架转速更接近太阳轮转速
ZF Indi 两级减速计算
有了上边的公式,就可以用来分析采埃孚这款减速器了。
ZF这款实际是两级NGW简单行星排的串联,因此可以使用两个NGW行星排的速比计算公式联立进行计算。
第一级:
$$n_{S1} + \alpha_1 n_{R1} = (1+\alpha_1) n_{PC1}$$
第二级:
$$n_{S2} + \alpha_2 n_{R2} = (1+\alpha_2) n_{PC2}$$
二级太阳轮和一级齿圈共转速:
$$n_{R1} = n_{S2}$$
二级行星架固定,转速为0:
$$n_{PC2} = 0$$
另外:
$$\alpha_1 = \frac{z_{R1}}{z_{S1}}, \alpha_2 = \frac{z_{R2}}{z_{S2}}$$
综合以上条件,可以得到:
$$n_{S1} = \frac{1+\alpha_1}{\alpha_1} n_{PC1} - \frac{1}{\alpha_1} n_{S2}$$
物理意义:这个式子本质上是一个转速平衡/分流关系:输入太阳轮转速 $n_{S1}$被分解成了两部分:
一部分通过一级行星架输出$n_{PC1}$,
另一部分通过二级行星排 → 齿圈输出$n_{R2}$
如果要作为减速器使用,那么直行情况左右车轮转速必须得相等,即$n_{PC1}$ = $n_{R2}$。那么齿比关系要满足的必要条件就是:
$$n_{PC1} = n_{R2}$$
最终得到减速器的速比计算公式为:
$$\frac{n_{S1}}{n_{PC1}} = \frac{n_{S1}}{n_{R2}} = \frac{1 + \alpha_1 + \alpha_1\alpha_2}{1 + \alpha_2}$$
结语
以上把ZF INdi减速器的减速原理,以及最重要的速比关系说明白了,还有差速的部分没有讲,这一部分是这款减速器的精华所在,留在下一篇吧!
