前言
想要使多个行星轮能够成功装配到太阳轮和齿圈之间,并且能够等分度平均的装配进去,行星轮个数和太阳轮、齿圈的齿数应满足一定的特定关系才行。下边从简单到复杂,分析市面上常见的行星齿轮配齿要求,分别是,简单NGW形式,双联行星轮形式。

图:行星齿轮传动示意图
简单NGW形式
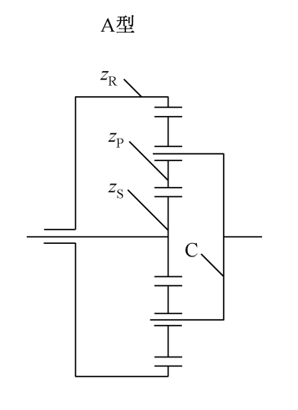
图:NGW行星减速器
这种形式齿数关系需要满足:
可以看到,只和太阳轮齿数,齿圈齿数,行星轮个数三个因素有关。
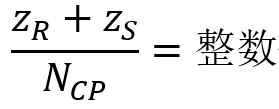
双联(复合)行星轮形式
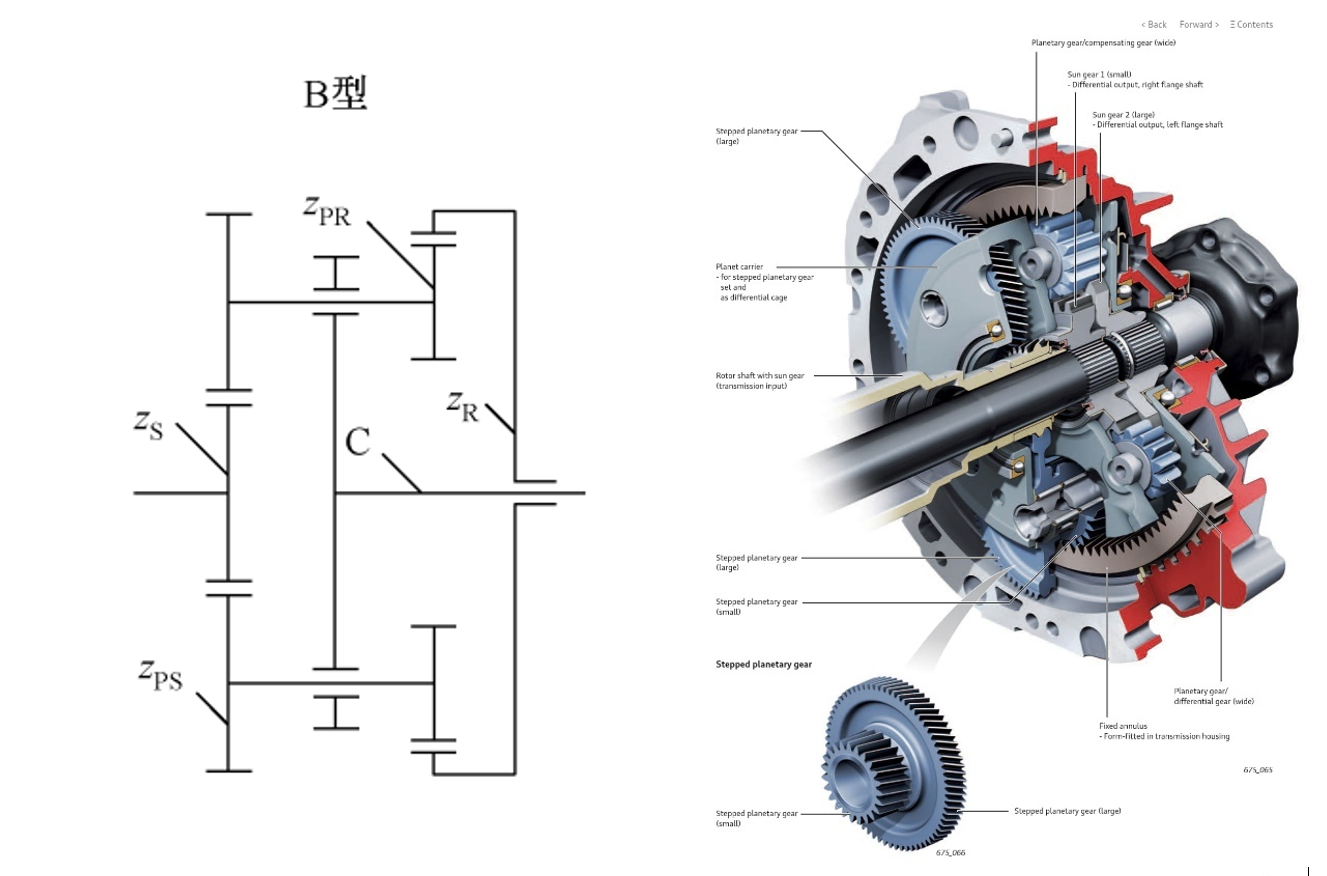
图:双联行星轮减速器
复合行星齿轮(双联行星轮)配齿要求的核心目的:
是保证多个行星轮能在行星架上等角度布置后,太阳轮与内齿圈能同时与所有行星轮正确啮合(相位不打架),并且装得进去。
为什么复合行星要“配齿”?
复合行星排里,一个行星位置上有两只刚性连在一起的齿轮(双联行星):
- 小行星轮与太阳轮啮合(外啮合)
- 大行星轮与内齿圈啮合(内啮合)
- 同一根行星轴上两只行星轮相对角度位置固定(也称作相位)
当你把N 个行星轮均匀分布在行星架上(比如 3、4、6、8 个),每个行星轮的中心角相差 。
问题在于:当你把第二个、第三个……行星轮放到新角度时,太阳轮和内齿圈的齿“走到哪一齿”是由齿数决定的;如果相位关系不对,就会出现:
- 某个行星轮与太阳轮能啮合,但与内齿圈啮合不上(或反过来)
- 或者必须把太阳轮/齿圈再转一点角度才能装进去
这就是“配齿”要解决的装配相位问题。
上图中主要参数说明:
- $z_{PS}$:行星轮中与太阳轮啮合那一只的齿数
- $z_{PR}$:行星轮中与内齿圈啮合那一只的齿数
- $z_S$:太阳轮齿数
- $z_R$:内齿圈齿数
- $N_{CP}$:行星轮个数
图:太阳轮/行星轮/齿圈的相位案例
复合行星“配齿”的方法
(1)先把两个行星轮齿数比化成“最简分数”
求最大公因子
$$F_c=\gcd(z_{PS},z_{PR})$$
把齿数比化成最简:
$$P_S^\prime=\frac{z_{PS}}{F_c},P_R^\prime=\frac{z_{PR}}{F_c}$$
如果两者互质,则 ,最简分数就是它本身。
通俗理解:${P}_S$和 ${P}_R$是“这对双联行星轮相位重复的最小周期”。
(2)最关键的配齿判据:必须能被行星个数整除
核心判定式:
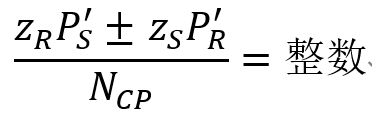
“±”号怎么理解?选 “+” 还是 “−”,取决于行星架固定时,太阳轮与内齿圈相沿着相同方向旋转时,取“−”)
这个公式在说什么?
把行星轮均布到第 2 个、第 3 个位置时,太阳轮“走过的齿数”和齿圈“走过的齿数”必须和双联行星的“最小重复周期”相匹配;否则每个行星位置需要的相位不同,无法同时装配。
(3) 实用的配齿经验
复合行星齿轮传动按上述配齿公式配齿。为了避免轮齿标记和生产装配的麻烦,可以用一些简单实用的配齿法则;
- 如内齿圈和行星轮按因子分解式配齿,当$z_R/N_{CP}$和$z_S/N_{CP}$都是整数时,装配会容易很多,行星轮齿数自由度更大。
- 或者使复合行星轮两个齿轮的齿数比为整数。如果一个行星轮的齿数是另一个行星齿轮齿数的倍数,轮系装配时,齿数较少的行星轮可以先放入啮合位置,则轮齿不需要作标记,参见图
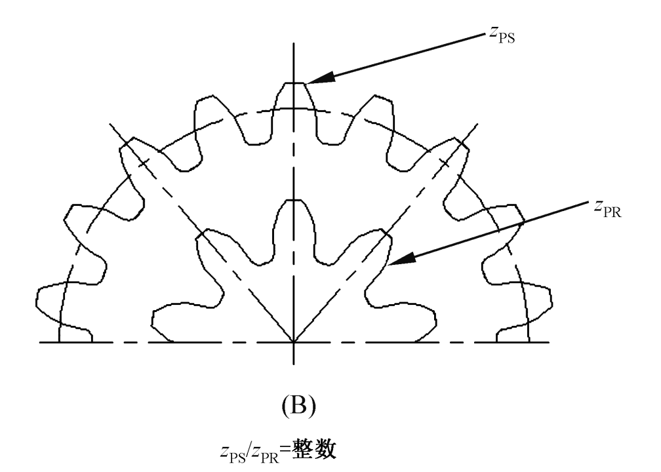
图:复合行星轮两个齿轮齿数可以整除
- 对不符合上面两个条件的,虽然也有可能实现成功配齿,需要更细致的相位分析与装配标记方案;或 相对 越“大”、越“麻烦”,实际装配可操作性越差,无法装配的可能性越大。
最后
在做行星齿轮速比设计的时候,可以将上述规则写成程序,做自动化的筛选。
当然,以上不是全部约束,实际设计时还必须考虑:
- 几何同心(一级和二级中心距一致、齿数关系或变位补偿)
- 行星间不干涉、外包络
- 强度、线载荷、轴承寿命
- 行星齿轮回转包络在合理范围内
- 重合度/NVH设计
可以将上述规则全部写进流程化的配齿程序,完成自动化的齿比计算。后续尝试做一做。
