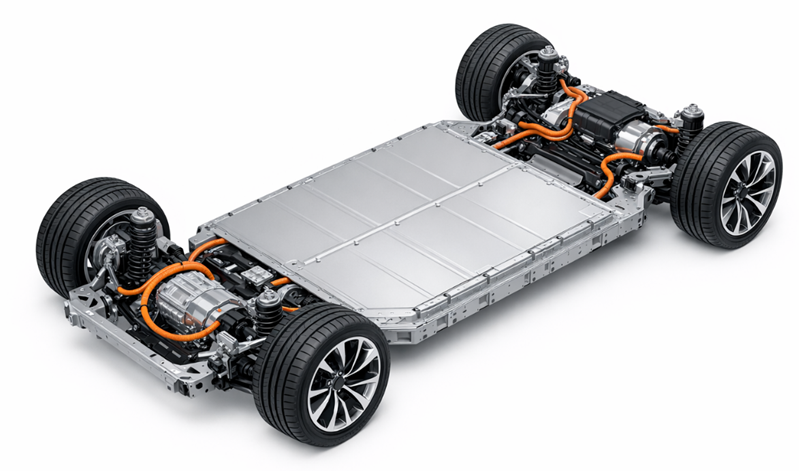
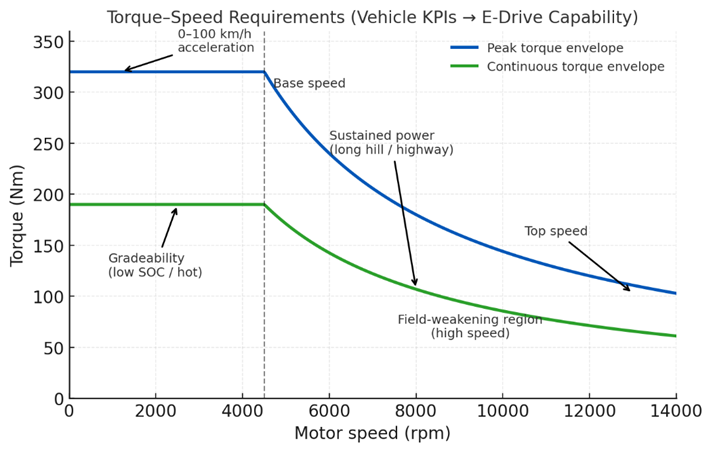
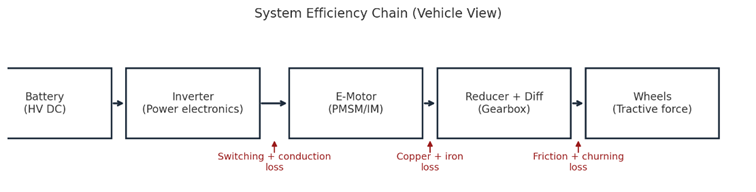
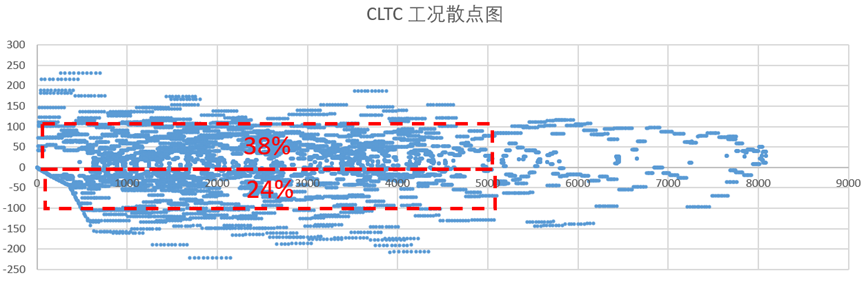
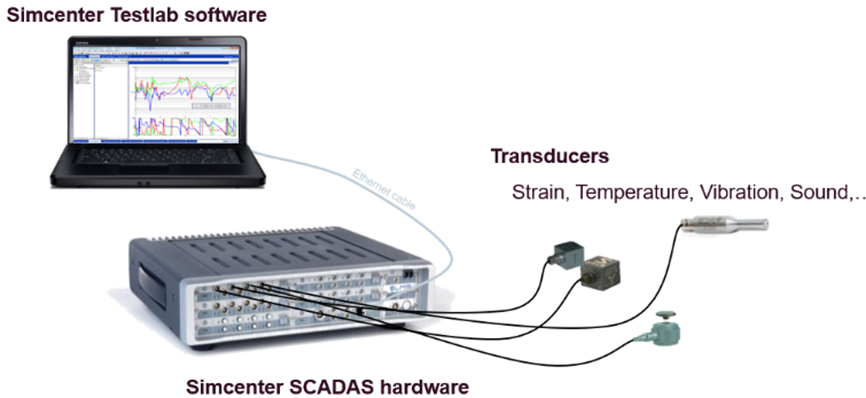
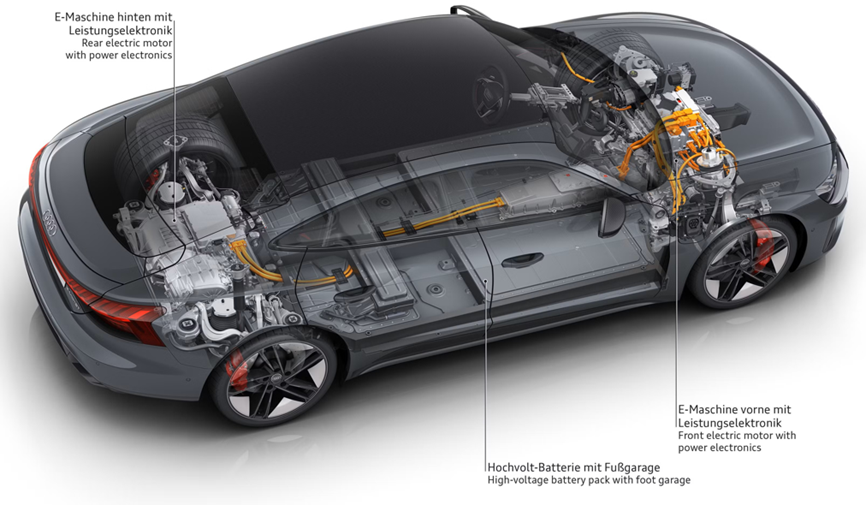
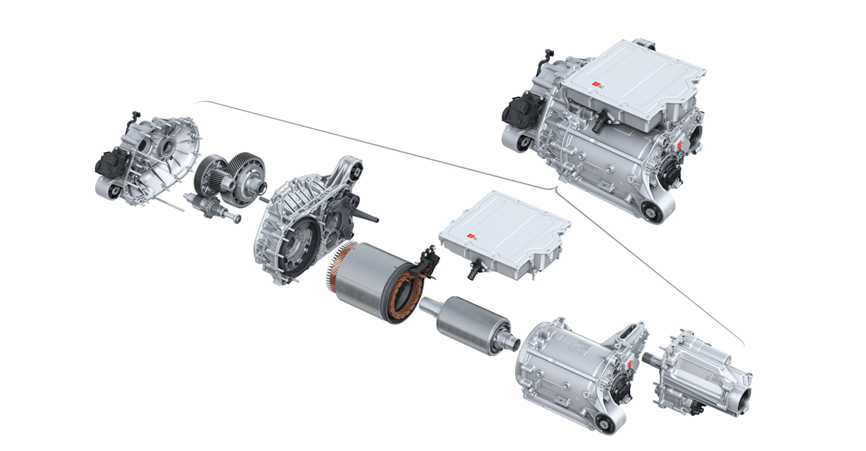
我们研究电驱动系统,从根本上来说,是满足整车的需求。那么我就想从根子上盘一盘从整车系统工程视角来看,对电驱动系统的需求到底是什么? 图:电动汽车底盘示意图 下面准备从五个维度,把整车对电驱的核心要求拆解开盘一盘。 把“加速、极速、爬坡、持续输出”交付出来(核心) 以国标 GB/T 18385《纯电动汽车动力性能试验方法》为参考,整车对动力的要求,最终会落到几个用户可感知、可测试的指标上: 30min最高车速:能持续行驶30min的最高车速。 短时最高车速:能保持稳定行驶200m的短时最高速度。 加速能力:0-100km/h原地起步加速能力和超越加速能力(从60km/h-100km/h) 爬坡车速:按照4%坡度和12%坡度能稳定行驶1km的最高车速。 最大爬坡度:全油门,车子爬坡过程中车速能保持稳定的最大坡度。 坡道起步能力:车辆能以不低于10m/min的速度通过10m测量区。 扭矩控制精度:驱动和制动扭矩响应准确性和灵敏性 这些指标拆解到电驱系统,本质就是电机外特性与控制能力是否匹配整车工况。电机峰值与持续外特性两条曲线决定整车“能跑多猛、能猛多久” 峰值扭矩/峰值功率决定短时间爆发(超车、起步、弹射),从整车角度一般会定义10s,20s,30s的峰值性能需求。 持续扭矩/持续功率决定长时间能力(长坡、高速30min巡航工况),从整车角度,一般会定义30min的持续性能需求 最高转速与弱磁能力:影响短时最高车速,从整车角度会定义最大轮端转速,例如大于1600rpm,或者某些性能车要求大于2000rpm。 扭矩控制精度:不仅是“驱动”,还有“回收”。踏板开度对应的扭矩输出要线性、可预测,回收扭矩要稳和精确:因为电机回收扭矩与制动扭矩要协调,共同制动。过去常见电机控制精度是扭矩<100Nm时,扭矩精度±3Nm,扭矩大于100Nm时,扭矩精度±3%,随着行业的发展,这个要求也在逐渐提高。 图:电机峰值与持续外特性与整车工况对照示意图 高效率的把动力“送到车轮” 从整车能耗拆解来看,电驱系统是最主要能量流经路径之一。整车对电驱的经济性要求,不能只盯电机“峰值效率”,而是看工况加权效率:在 CLTC/WLTC 或用户真实路况里,系统在“常用转速-扭矩区间”的综合效率才决定续航。 整车更关心“系统效率链”,而不是单点效率 电能从电池到车轮,典型链路包括: 电池/高压 →逆变器(开关/导通损耗) 逆变器 →电机(铜损、铁损、杂散损耗) 电机 →减速器(轴承/齿轮摩擦、搅油损耗) 最终到车轮 图:系统效率链 从整车角度,通常要考核: 电驱总成综合效率,如CLTC/WLTC。现如今CLTC工况效率都竞相达到93.5%,甚至94%令人抓狂的地步了。 典型工况点效率最优,尤其城市低速低扭矩区域,以某个车型的CLTC工况为例,在电机转速<5000rpm,扭矩±100Nm以内的工况点大约会占到CLTC 总工况点的60%-70%,见示意图。 在高温、低SOC、电压波动时效率与性能保持性 图:CLTC工况散点分布示意图 技术抓手:硬件+软件一起决定“省不省电” 电机电磁设计:提高常用区效率,减少铁损与杂散损耗 功率器件与拓扑:降低开关损耗与导通损耗(也影响热与可靠性) 减速器效率:齿形修形、轴承选择、润滑与搅油控制 软件控制策略: - 最大效率控制(MTPA/效率最优) - 弱磁策略在保证高速能力的同时避免效率“塌陷” - 回收策略让能量回得更多且驾驶感受可控 更安静、更平顺、更省空间 没有发动机噪声“掩盖”之后,电驱的噪声与振动会被放大。整车对电驱舒适性的要求,主要体现在两条线: NVH:不刺耳、不共振、不啸叫 布置与空间:不占空间、不影响座舱/后备厢/悬架布置 NVH:电磁噪声、齿轮啸叫、结构共振都要管 整车经常会提出类似指标或主观目标: 电机电磁噪声低(特定转速区避免明显啸叫阶次) 减速器齿轮啸叫受控(传递误差、啮合刚度波动) 控制器引起的电磁噪声可控(PWM策略、载波频率选择) 全转速范围无明显共振点(结构刚度与模态避开激励) 振动隔离与安装刚度匹配(机电耦合到车身的路径控制) 整车分解到电驱动系统NVH的定量指标: 测试条件一般定义是半消音室,五点平均声压级。 按照阶次和扭矩大小进行分别定义:例如WOT 5-15阶次 小于70dB(A),15-30阶次小于 66dB(A)。当然中低转速分贝要求会更低。 图:常用的NVH测试设备 电驱“挤出来”的空间就是整车竞争力 整车布置是硬约束,对电驱系统常见诉求包括: 更短的轴向尺寸(为悬架与碰撞结构让空间) 更短的Z向高度(为车内平地板让出空间,还要保证安全离地间隙) 更短的X向长度(为电池包等让出空间) 更轻的质量(直接影响能耗与操控) 更高的集成度(例如电驱三合一/多合一,减少线束与接口) 图:整车视角电驱布置示意图 不仅要“能跑”,更要“可控、可退、可诊断” 电驱属于高压高功率系统,且扭矩输出直接作用于车轮,对整车安全至关重要。通常整车会有以下要求: 功能安全(Functional Safety) 满足ISO 26262相关要求(从整车分解到电驱子系统的ASIL等级) 关键安全目标常见包括: -- 防止非预期扭矩(突然加速/突然反扭矩)ASIL等级一般要求达到 Level C,但是随着高阶智驾的需求,有提高到Level D的趋势。 -- 高压安全(绝缘、漏电、互锁) -- 热安全(过温保护、降额策略) 故障可降级:能“跛行回家” 整车更愿意看到的是:故障发生后系统可预测地降级,而不是直接“趴窝”。例如: 传感器故障进入替代策略(限扭、限速) 冷却能力下降时进入热降额曲线 局部失效仍可维持低功率行驶到安全地点(limp home) 图:汽车功能安全开发流程 EMC与耐久可靠性:长期不出“隐性问题” 电磁兼容(EMC):不干扰整车通信、雷达、音响等,同时自身抗扰度强 寿命与可靠性:满足整车寿命目标(通常8年或15万公里),并覆盖振动、盐雾、涉水、冷热冲击等环境谱 可诊断性:故障码设计、可追溯数据、可服务性(对售后与用户体验直接相关) 最有性价比地把上述能力“做出来并量产” 成本不是最后才考虑的指标,而是贯穿方案选择的主线。整车对电驱成本的关注通常包括: 系统成本:材料+制造+验证全链路 材料成本:硅钢、铜、磁钢(稀土)、功率器件、轴承与齿轮材料等 制造成本:绕组工艺、装配一致性、测试节拍、良率 验证成本:DV/PV、耐久、环境与法规等试验资源 供应链稳定:避免“卡脖子”与波动风险 关键物料(磁钢、IGBT/SiC、MCU/驱动芯片、轴承等)的可获得性 多供应与替代设计能力(平台化、可替换BOM策略) 图:电驱动系统爆炸图 量产性:可制造、可一致、可交付 整车真正需要的是“可持续交付的性能”,因此电驱必须: 设计可制造(DFM)与可装配(DFA) 批量一致性好(噪声、效率、扭矩一致) 产线端测试覆盖充分,质量闭环健全 以上从五个维度盘了盘从整车视角出发,对电驱动系统的主要需求,核心需求还是围绕提供扭矩和功率来的。通过这个盘点,后续在考虑问题的时候,有助于从第一性角度出发思考底层需求到底是什么。前言
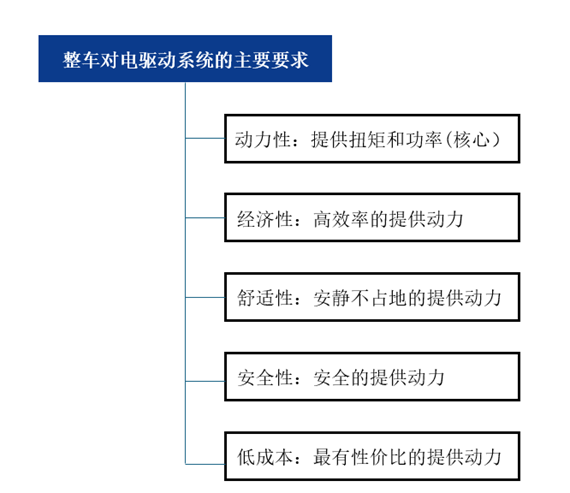
1 动力性
2 经济性
3 舒适性
4 尺寸与重量
5 安全性

6 成本
结语
电动车时代,电驱动系统(电机+逆变器/控制器+减速器/差速器+软件控制)已经成为影响整车产品力的核心子系统之一。
很多人直觉上会把它理解为“一个电机+一个控制器+一个减速箱”的叠加
但从整车视角来看,电驱更像是一个把能量、控制与机械输出耦合在一起的系统工程问题:它既要在你深踩电门时给足爆发,也要在你日常通勤时尽可能省电;既要安静不刺耳,也要在故障或极端环境下扭矩不失控、即使出现故障也能做到可控,可降级;同时还必须满足整车布置空间、重量和成本的现实边界。
最后编辑:2026年07月04日
©著作权归作者所有
